首页
产品中心
轻辙视觉引擎
工业AI视觉系统
轻辙标注训练平台
硬件选型工具
解决方案
2D视觉解决方案
3D视觉解决方案
成功案例
3c电子
新能源
木材加工
物流运输
家电制造
纺织行业
其他行业
关于我们
深眸科技
联系我们
加入我们
新闻资讯
新闻资讯
首页
产品中心
轻辙视觉引擎
工业AI视觉系统
轻辙标注训练平台
硬件选型工具
解决方案
2D视觉解决方案
3D视觉解决方案
成功案例
3c电子
新能源
木材加工
物流运输
家电制造
纺织行业
其他行业
关于我们
深眸科技
联系我们
加入我们
新闻资讯
新闻资讯
解决方案
SOLUTION
一站式、体系化AI视觉解决方案,打通制造生产全场景应用
工业AI视觉服务
攻克核心技术难关,自主研发创新技术,不断升级产品应用的覆盖维度,为市场提供具有高度需求匹配度一站式AI视觉解决方案, 满足2D/3D视觉检测服务,在不同制造业的上千种细分场景下实现落地,如缺陷检测、尺寸测量、物流供包、视觉分拣、工件上下料等。
解决方案
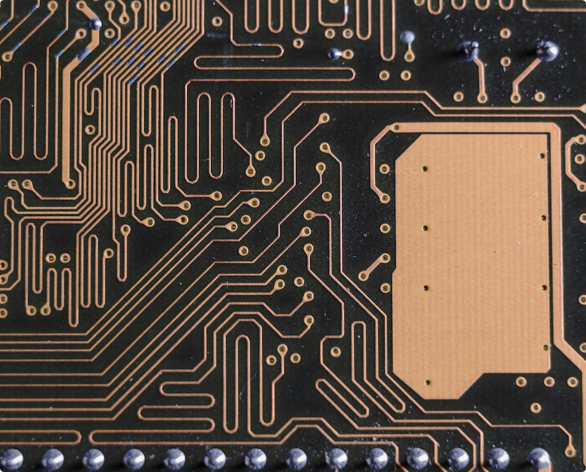
2D视觉解决方案
根据灰度及对比度来进行参考检测,解决定位、检测、测量、识别等视觉应用需求。
定位
对无序摆放的零件进行姿态识别抓取,计算抓取点,实现上下料、分拣及装配等工序
识别
对复杂环境下不同类型的数字、字母、文字以及其他特殊字符进行高精度的快速识别
测量
算工业零部件的几何数据,包含但不限于不长度、宽度角度、半径、面积及曲率等信息
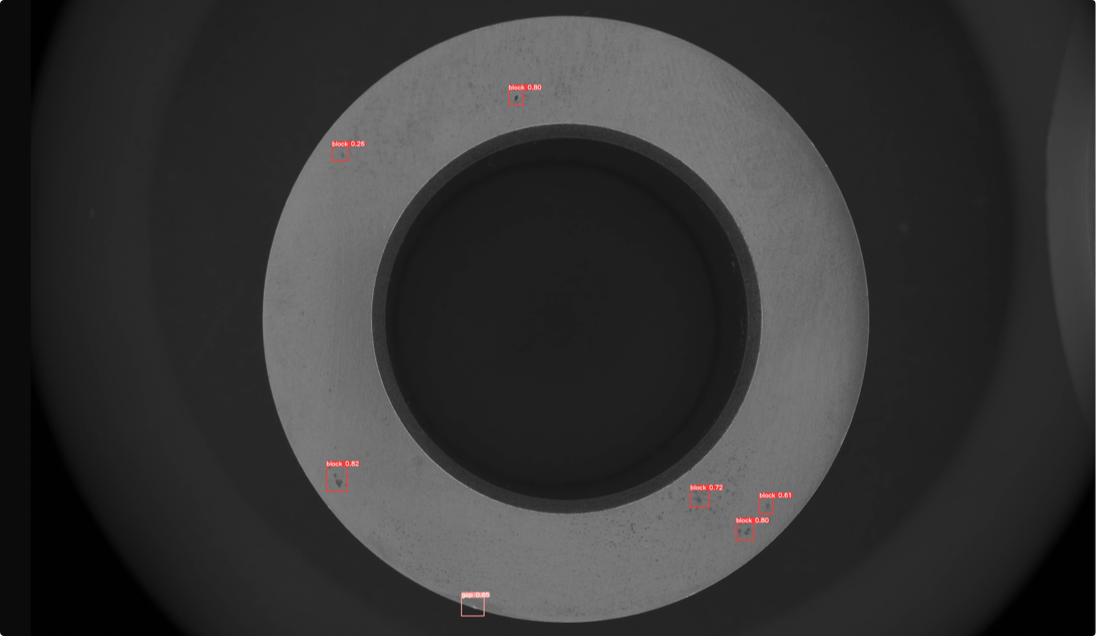
检测
对图像中的裂纹、缺损、色差、划痕、等缺陷特征进行标注,实现定向识别检测
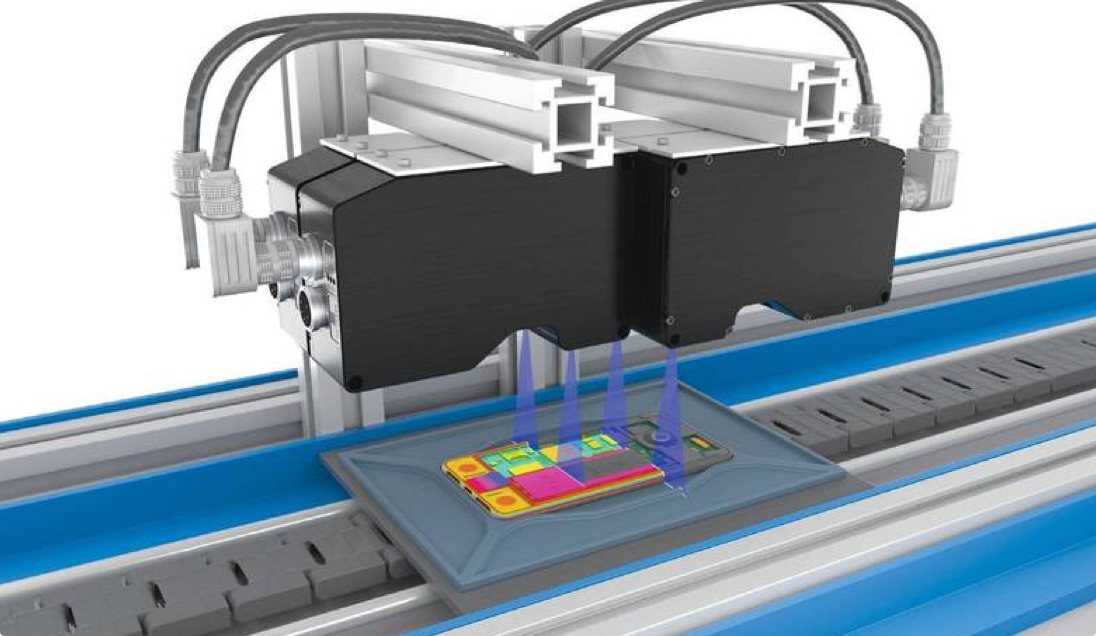
3D视觉解决方案
依托强大的3D视觉核心算法与工业级系统软件能力,以客户为中心,柔性化定制成本最优、性价比最高的3D视觉解决方案。
3D视觉分类
稳定区分不同形状、大小、包装,对多种物品进行识别、定位、抓取和分类
3D视觉测量
支持多种操作系统和图像采集硬件设备,精确测量尺寸、面积、角度、交点、深度等
3D视觉引导
动态路径规划,根据不同场景适配不同算法模型,实时调整机械臂的路线轨迹
3D视觉检测
快速识别破损、尺寸不标准、圆形度不良或凸起、脏污、划痕和表面残留污等多种缺陷
成功案例
查看更多案例>>
新能源行业
家电行业
3C行业
纺织行业
木材行业
物流行业
其他行业
 一站式、体系化AI视觉解决方案,打通制造生产全场景应用
一站式、体系化AI视觉解决方案,打通制造生产全场景应用